Приложение для управления дроном
Комплексное программное обеспечение для управления БПЛА
Высокооптимизированная система управления дронами, разработанная на C++ с использованием протокола MAVLink на базе PX4-Autopilot. Проект отличается кроссплатформенностью (x86, ARM) и высокой производительностью, обеспечивая стабильную работу даже на микрокомпьютерах уровня Raspberry Pi 4.
Ключевые возможности и стек технологий:
1) Управление полетом: Поддержка ручного и offboard режимов, выполнение автоматизированных полетных заданий (flight tasks), полноценный автопилот. Разработана удобная панель Оператора.
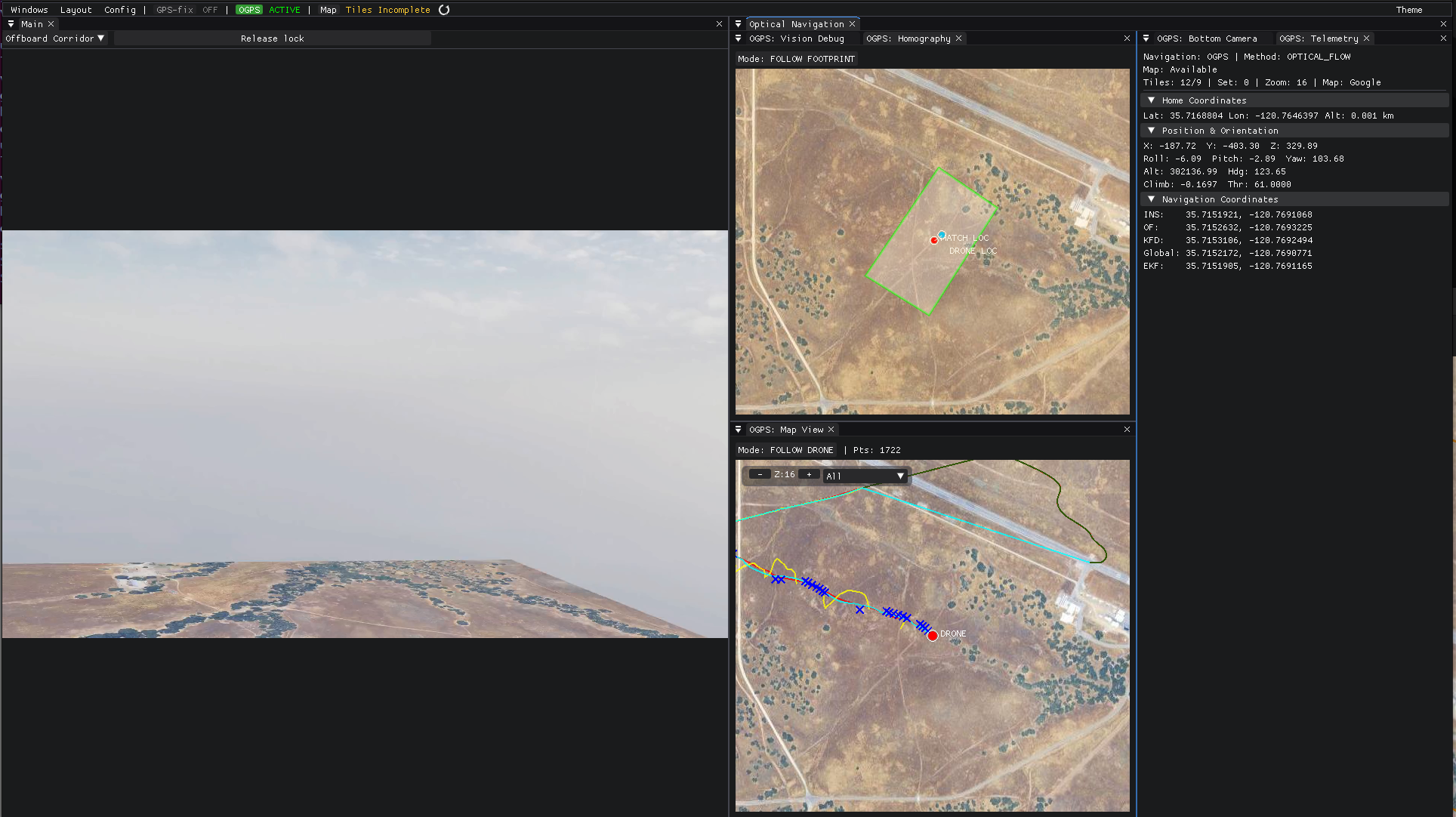
2) Компьютерное зрение (CV): Многоуровневая система навигации для условий отсутствия GPS (GPS-denied). Интегрировано YOLO для обнаружения и отслеживания объектов, а также система ROI-lock для автоматического захвата и удержания целей.
3) Мультимедиа и Данные: Обработка видеопотока реализована с помощью GStreamer. Для локального хранения данных используется SQLite. Система оснащена динамическим загрузчиком карт (Dynamic Map Downloader).
4) Сеть и обмен данными: Надежное подключение по протоколу UDP. Реализована сверхбыстрая бинарная сериализация и десериализация сетевых пакетов. Для эффективной генерации, валидации и обработки типов данных применено C++ метапрограммирование, что обеспечивает максимальную оптимизацию и безопасность типов (type safety) еще на этапе компиляции.
5) Симуляция и тестирование: Проект полностью настроен для работы с симуляторами Gazebo и FlightGear.
Высокооптимизированная система управления дронами, разработанная на C++ с использованием протокола MAVLink на базе PX4-Autopilot. Проект отличается кроссплатформенностью (x86, ARM) и высокой производительностью, обеспечивая стабильную работу даже на микрокомпьютерах уровня Raspberry Pi 4.
Ключевые возможности и стек технологий:
1) Управление полетом: Поддержка ручного и offboard режимов, выполнение автоматизированных полетных заданий (flight tasks), полноценный автопилот. Разработана удобная панель Оператора.
2) Компьютерное зрение (CV): Многоуровневая система навигации для условий отсутствия GPS (GPS-denied). Интегрировано YOLO для обнаружения и отслеживания объектов, а также система ROI-lock для автоматического захвата и удержания целей.
3) Мультимедиа и Данные: Обработка видеопотока реализована с помощью GStreamer. Для локального хранения данных используется SQLite. Система оснащена динамическим загрузчиком карт (Dynamic Map Downloader).
4) Сеть и обмен данными: Надежное подключение по протоколу UDP. Реализована сверхбыстрая бинарная сериализация и десериализация сетевых пакетов. Для эффективной генерации, валидации и обработки типов данных применено C++ метапрограммирование, что обеспечивает максимальную оптимизацию и безопасность типов (type safety) еще на этапе компиляции.
5) Симуляция и тестирование: Проект полностью настроен для работы с симуляторами Gazebo и FlightGear.
 Дубаи
Дубаи