Пневматический захват для подносов
Инжиниринг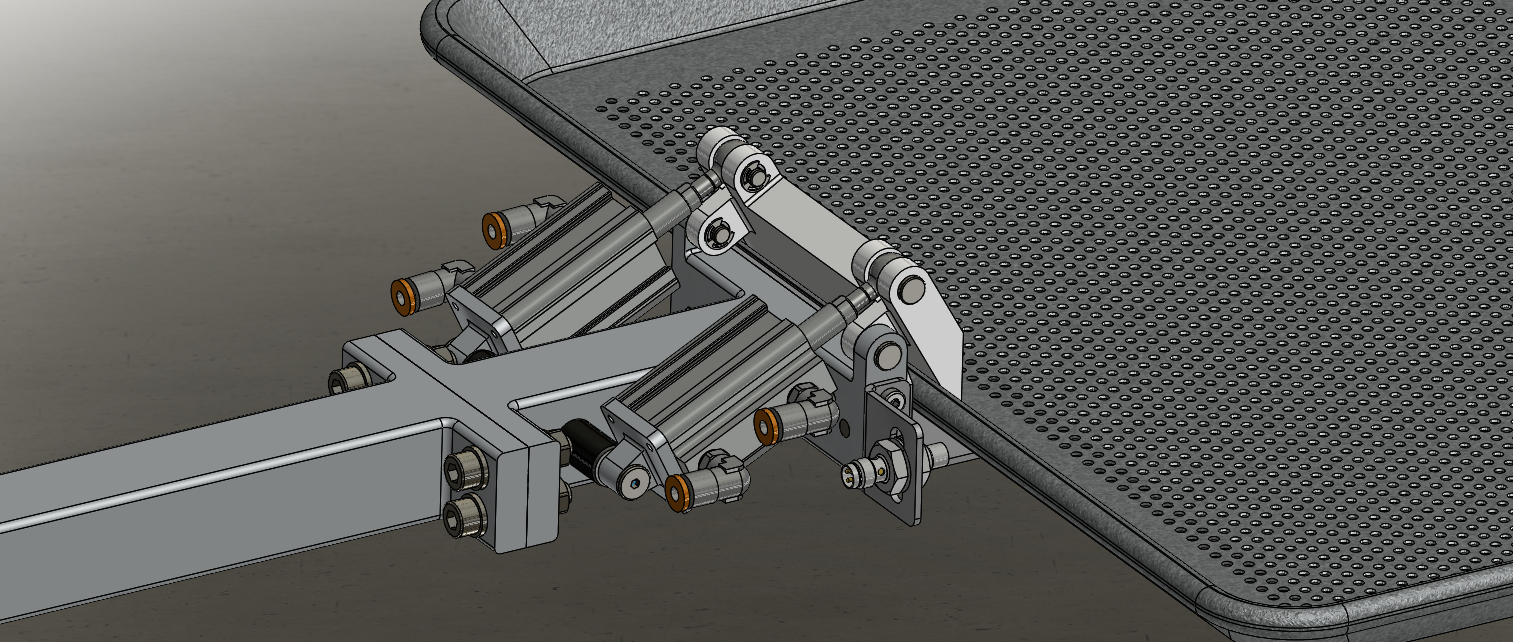
Захват для подносов, адаптированный под роботизированную систему
Разработано специальное захватное устройство для автоматизированного захвата и перемещения подносов с нагрузкой. Система адаптирована для установки на роботизированный манипулятор, обеспечивает надежный и стабильный захват во время работы.
Основные особенности:
- Пневматический механизм захвата – обеспечивает сильное и контролируемое сжатие для удержания подносов даже с тяжелым грузом.
- Специальная геометрия захвата – приспособлена под форму и габариты подносов для максимальной стабильности.
- Адаптация к работе с промышленным роботом – конструкция предполагает легкое крепление к стандартным фланцам роботов.
- Оптимизированный вес конструкции – позволяет сохранять динамику и точность движения робота.
- Возможность работы в циклическом режиме – рассчитана на интенсивное использование в автоматизированных процессах.
Проект выполнен в SolidWorks, с учетом весовых характеристик и распределения нагрузки.
Разработано специальное захватное устройство для автоматизированного захвата и перемещения подносов с нагрузкой. Система адаптирована для установки на роботизированный манипулятор, обеспечивает надежный и стабильный захват во время работы.
Основные особенности:
- Пневматический механизм захвата – обеспечивает сильное и контролируемое сжатие для удержания подносов даже с тяжелым грузом.
- Специальная геометрия захвата – приспособлена под форму и габариты подносов для максимальной стабильности.
- Адаптация к работе с промышленным роботом – конструкция предполагает легкое крепление к стандартным фланцам роботов.
- Оптимизированный вес конструкции – позволяет сохранять динамику и точность движения робота.
- Возможность работы в циклическом режиме – рассчитана на интенсивное использование в автоматизированных процессах.
Проект выполнен в SolidWorks, с учетом весовых характеристик и распределения нагрузки.