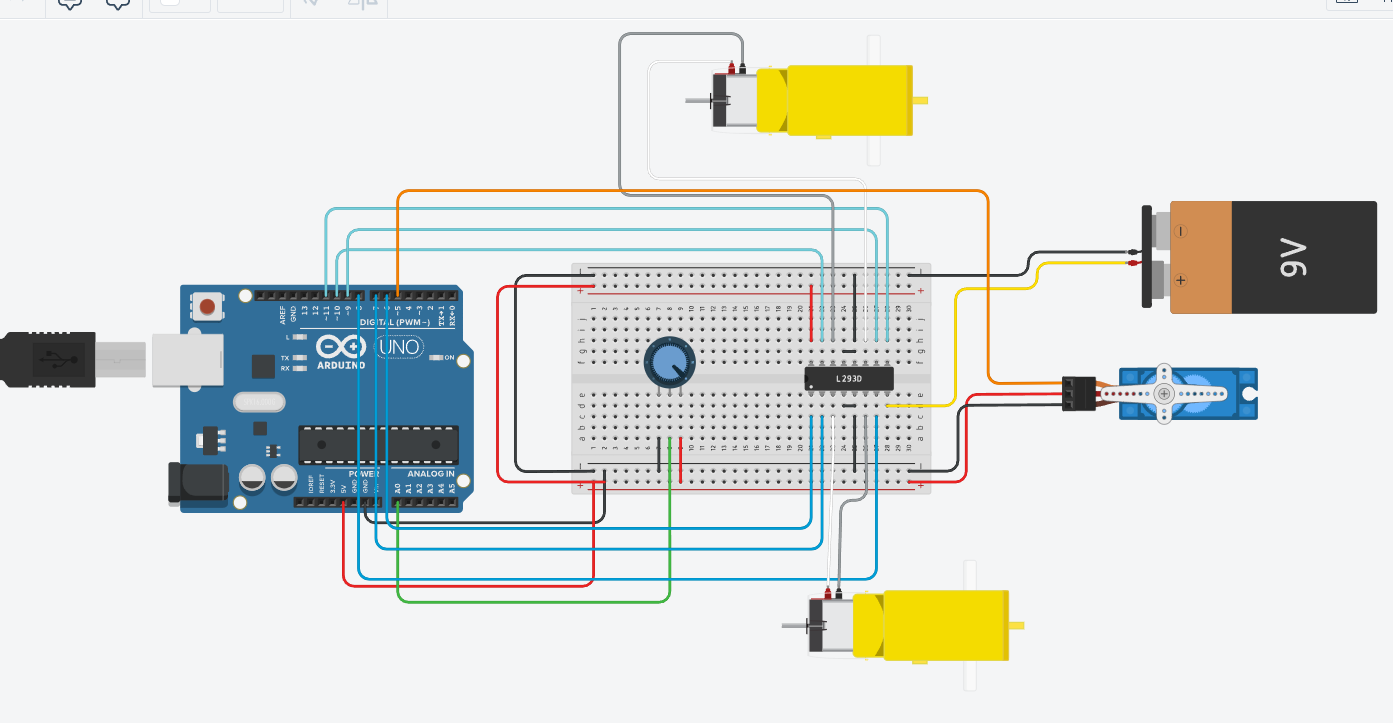
Данный проект представляет собой систему управления двумя моторами постоянного тока и одним сервоприводом с помощью микроконтроллера Arduino Uno. Он был реализован в учебных целях для демонстрации навыков работы с моторным драйвером L293D, потенциометром, сервоприводом и макетной платой.
Цель проекта:
Создать управляемую платформу, в которой пользователь может с помощью потенциометра изменять положение сервомотора или регулировать направление и скорость вращения моторов постоянного тока.
Используемые компоненты:
Плата Arduino Uno
Моторный драйвер L293D
2 двигателя постоянного тока
1 сервопривод
Потенциометр
Макетная плата
Источники питания (USB и 9V батарея)
Функционал:
Управление направлением вращения двух моторов через драйвер L293D.
Контроль положения сервомотора с помощью потенциометра.
Использование аналогового сигнала от потенциометра для задания скорости или угла.
Отдельное питание для моторов и контроллера, что обеспечивает стабильную работу системы.
Навыки, продемонстрированные в проекте:
Проектирование схем на макетной плате
Работа с внешним питанием и защита контроллера
Управление ШИМ-сигналами (PWM)
Использование потенциометра для аналогового ввода
Программирование Arduino для работы с моторами и сенсорами
Применение:
Подобная система может быть использована для создания:
Роботизированных тележек
Манипуляторов
Интерактивных моделей и тренажёров
Цель проекта:
Создать управляемую платформу, в которой пользователь может с помощью потенциометра изменять положение сервомотора или регулировать направление и скорость вращения моторов постоянного тока.
Используемые компоненты:
Плата Arduino Uno
Моторный драйвер L293D
2 двигателя постоянного тока
1 сервопривод
Потенциометр
Макетная плата
Источники питания (USB и 9V батарея)
Функционал:
Управление направлением вращения двух моторов через драйвер L293D.
Контроль положения сервомотора с помощью потенциометра.
Использование аналогового сигнала от потенциометра для задания скорости или угла.
Отдельное питание для моторов и контроллера, что обеспечивает стабильную работу системы.
Навыки, продемонстрированные в проекте:
Проектирование схем на макетной плате
Работа с внешним питанием и защита контроллера
Управление ШИМ-сигналами (PWM)
Использование потенциометра для аналогового ввода
Программирование Arduino для работы с моторами и сенсорами
Применение:
Подобная система может быть использована для создания:
Роботизированных тележек
Манипуляторов
Интерактивных моделей и тренажёров