Ta projekt to wysokoprecyzyjny system pozycjonowania wewnątrz pomieszczeń oparty na technologii nad szerokopasmowym łączem (UWB). Używa kilku kotwic UWB, umieszczonych w stałych pozycjach, oraz mobilnej nakładki UWB zamontowanej na poruszającym się obiekcie (np. robot lub wózek). System nieprzerwanie mierzy czas przelotu (ToF) między nakładką a kotwicami, a także stosuje wieloliniową trilaterację do obliczania dwuwymiarowych współrzędnych nakładki w czasie rzeczywistym.
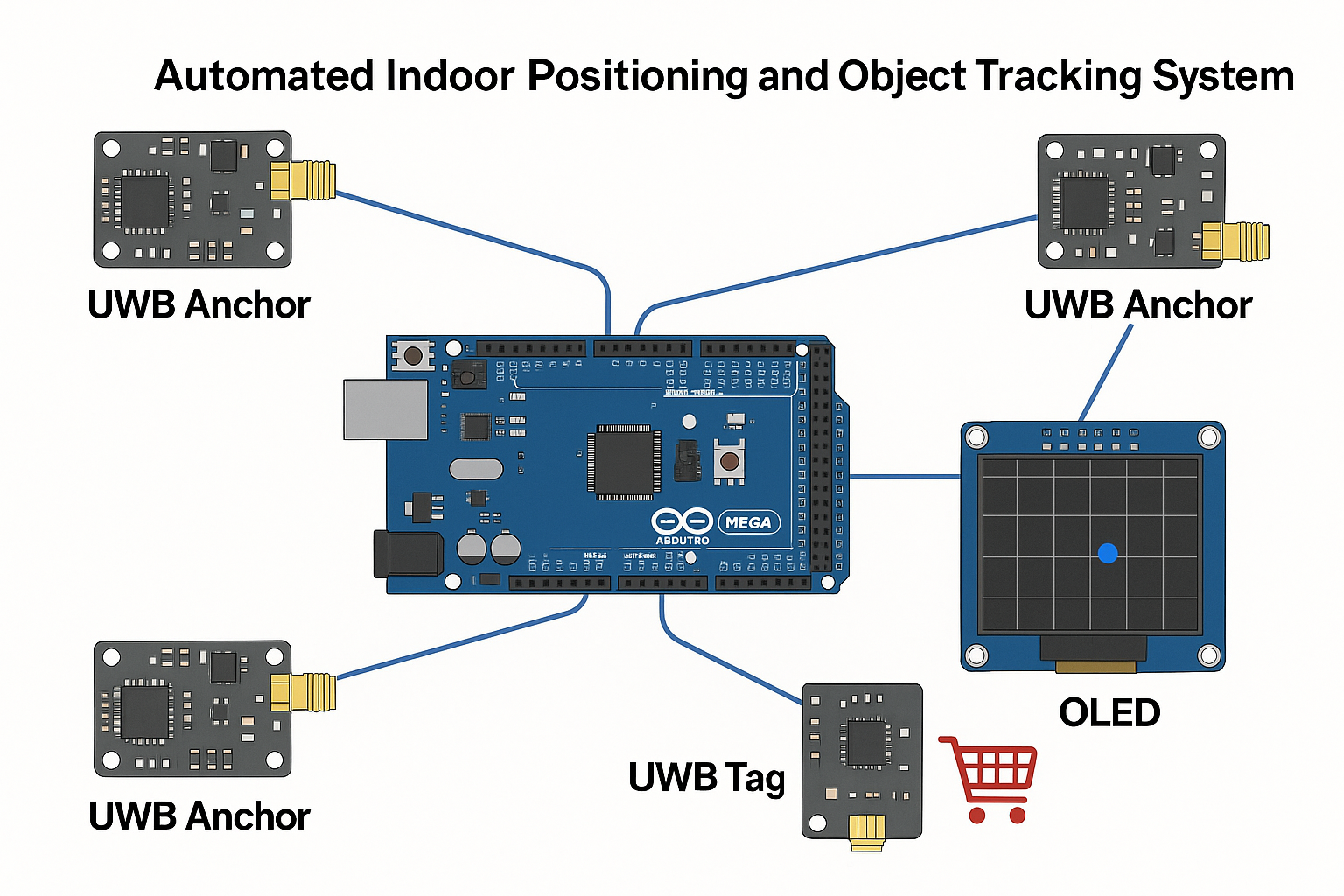
Arduino Mega pełni rolę centralnego kontrolera, który nawiązuje łączność z modułami UWB i oblicza pozycję. Aktualne położenie jest wyświetlane na ekranie OLED w czasie rzeczywistym.
Arduino Mega pełni rolę centralnego kontrolera, który nawiązuje łączność z modułami UWB i oblicza pozycję. Aktualne położenie jest wyświetlane na ekranie OLED w czasie rzeczywistym.