Pneumatyczny chwytak do tac
Doradztwo inżynieryjne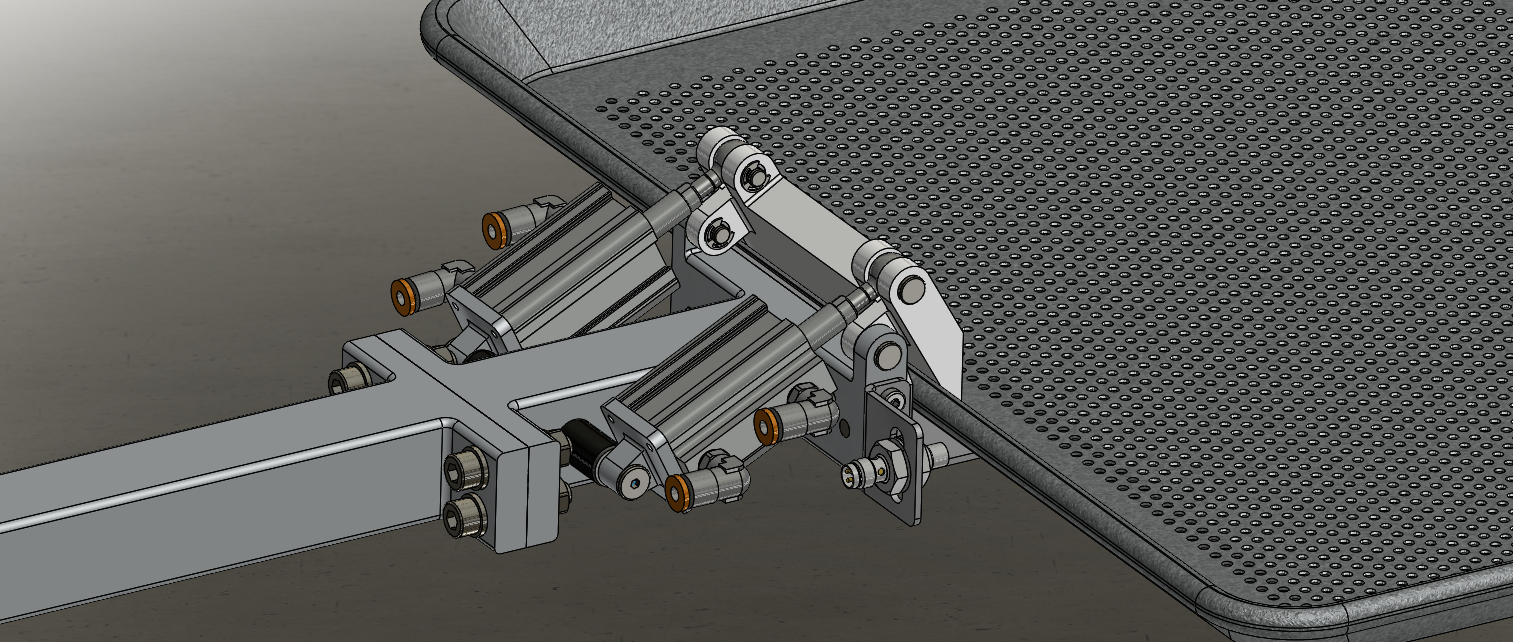
Chwytak do tac, dostosowany do systemu robotycznego
Opracowano specjalne urządzenie chwytające do automatycznego chwytania i przenoszenia tac z ładunkiem. System jest dostosowany do montażu na robotycznym manipulatorze, zapewniając niezawodny i stabilny chwyt podczas pracy.
Główne cechy:
- Pneumatyczny mechanizm chwytania – zapewnia silne i kontrolowane ściskanie, aby utrzymać tace nawet z ciężkim ładunkiem.
- Specjalna geometria chwytaka – dostosowana do kształtu i wymiarów tac dla maksymalnej stabilności.
- Dostosowanie do pracy z robotem przemysłowym – konstrukcja przewiduje łatwe mocowanie do standardowych flanszy robotów.
- Optymalna waga konstrukcji – pozwala zachować dynamikę i precyzję ruchu robota.
- Możliwość pracy w trybie cyklicznym – zaprojektowana do intensywnego użytkowania w zautomatyzowanych procesach.
Projekt wykonany w SolidWorks, z uwzględnieniem charakterystyk wagowych i rozkładu obciążenia.
Opracowano specjalne urządzenie chwytające do automatycznego chwytania i przenoszenia tac z ładunkiem. System jest dostosowany do montażu na robotycznym manipulatorze, zapewniając niezawodny i stabilny chwyt podczas pracy.
Główne cechy:
- Pneumatyczny mechanizm chwytania – zapewnia silne i kontrolowane ściskanie, aby utrzymać tace nawet z ciężkim ładunkiem.
- Specjalna geometria chwytaka – dostosowana do kształtu i wymiarów tac dla maksymalnej stabilności.
- Dostosowanie do pracy z robotem przemysłowym – konstrukcja przewiduje łatwe mocowanie do standardowych flanszy robotów.
- Optymalna waga konstrukcji – pozwala zachować dynamikę i precyzję ruchu robota.
- Możliwość pracy w trybie cyklicznym – zaprojektowana do intensywnego użytkowania w zautomatyzowanych procesach.
Projekt wykonany w SolidWorks, z uwzględnieniem charakterystyk wagowych i rozkładu obciążenia.