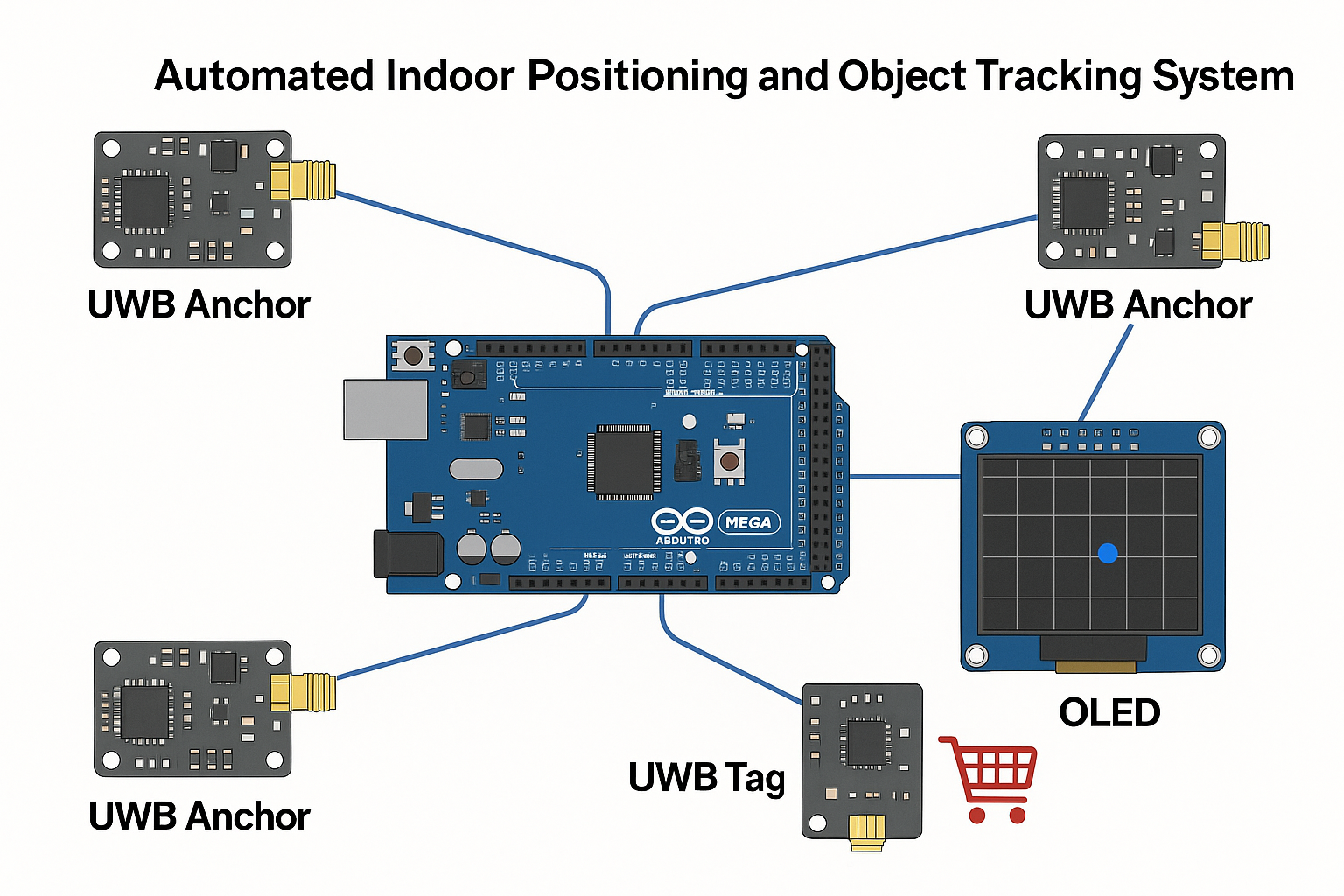
Цей проект являє собою високоточну систему позиціонування в приміщенні, що базується на технології надширокосмугового зв'язку (UWB). Вона використовує кілька UWB-якорів, розміщених у фіксованих положеннях, та мобільну UWB-мітку, встановлену на рухомому об'єкті (наприклад, роботі чи візку). Система безперервно вимірює час прольоту (ToF) між міткою та якорями, а також застосовує мультилатерацію для обчислення двовимірних координат мітки в реальному часі.
Arduino Mega виступає в ролі центрального контролера, який здійснює зв'язок з UWB-модулями та обчислює положення. Поточне розташування візуалізується на OLED-дисплеї в режимі реального часу.
Arduino Mega виступає в ролі центрального контролера, який здійснює зв'язок з UWB-модулями та обчислює положення. Поточне розташування візуалізується на OLED-дисплеї в режимі реального часу.