Розробка модульної програмної платформи для керування робочою камерою.
Робо-камера є маніпулятором з циліндричною системою координат, платою управління Arduino UNO і камерою OV7670 з платою управління Arduino NANO.
Обидві плати керування підключаються до комп'ютера через інтерфейс USB за протоколом Serial.
Ідея розробити платформу (API), що дозволяє абстрагуватися від протоколів обміну даними між плагіном і робо-камерою, плагін реалізує певний фукціонал, наприклад: ручне керування робо-камерою, пошук особи на зображенні та слідування за ним і т.п.
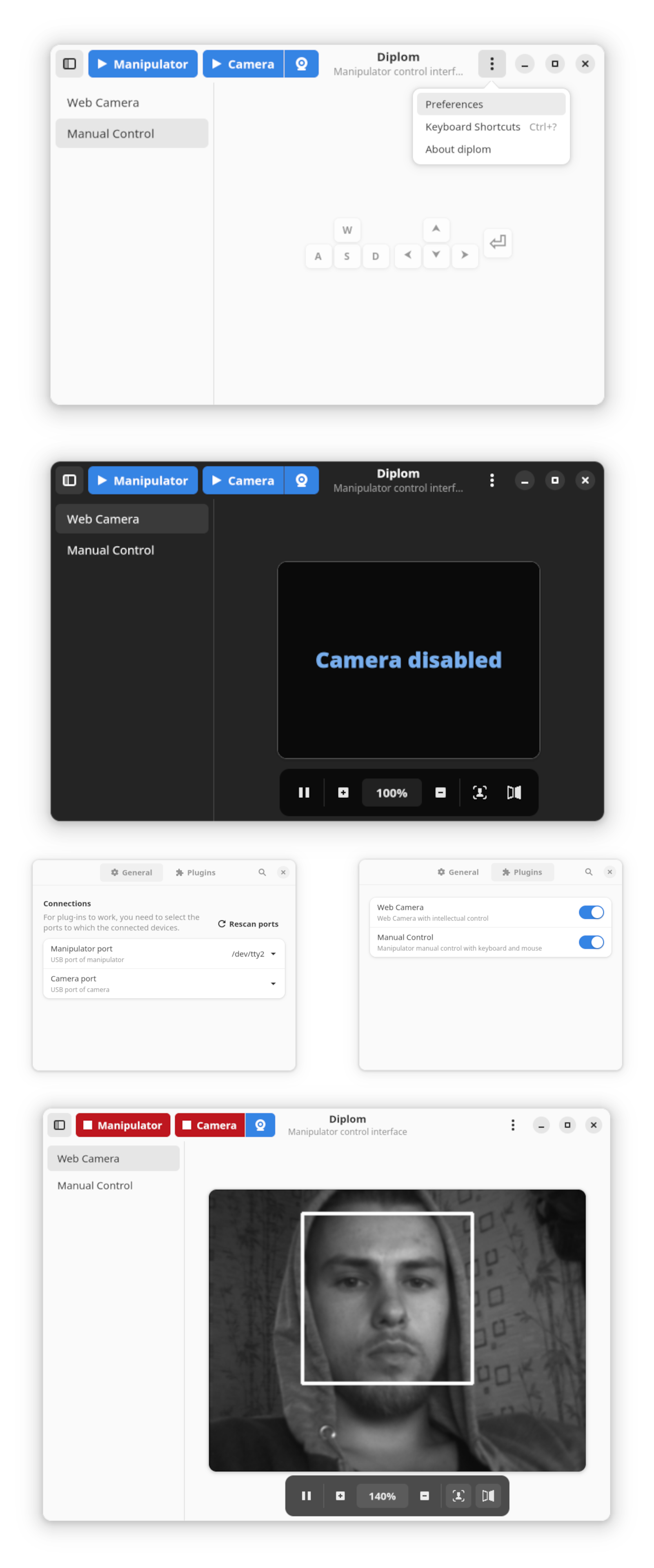
Функціонал програми:
- чутливий та адаптивний сучасний дизайн;
- фукціонал підключення/відключення від робо-камери та обробка всіх пов'язаних з цим помилок;
- система автоматично підвантажує з файлової системи всі доступні плагіни та відображає їх;
- плаваючий віджет камери, що дозволяє бачити зображення на будь-якому обраному плагіні;
- налаштування з'єднання та активація/деактивація плагінів.
Реалізовано вбудовані плагіни:
- ручне керування робочою камерою, керування здійснюється за допомогою клавіатури;
- керування за допомогою машинного зору, пошук особи на зображенні та слідування за ним.
Стек:
- Gtk4 та компоненти Adwaita, Gio, GDK, GObject, GLib;
- Python3;
- OpenCV, PySerial, logging, Cairo, numpy;
- CSS;
- Linux, PyCharm, Gnome Builder, Cambalache, Glade.
#Gtk #Python3 #usb #OpenCV #NumPy #css #Pycharm #desktop #linux
Робо-камера є маніпулятором з циліндричною системою координат, платою управління Arduino UNO і камерою OV7670 з платою управління Arduino NANO.
Обидві плати керування підключаються до комп'ютера через інтерфейс USB за протоколом Serial.
Ідея розробити платформу (API), що дозволяє абстрагуватися від протоколів обміну даними між плагіном і робо-камерою, плагін реалізує певний фукціонал, наприклад: ручне керування робо-камерою, пошук особи на зображенні та слідування за ним і т.п.
Функціонал програми:
- чутливий та адаптивний сучасний дизайн;
- фукціонал підключення/відключення від робо-камери та обробка всіх пов'язаних з цим помилок;
- система автоматично підвантажує з файлової системи всі доступні плагіни та відображає їх;
- плаваючий віджет камери, що дозволяє бачити зображення на будь-якому обраному плагіні;
- налаштування з'єднання та активація/деактивація плагінів.
Реалізовано вбудовані плагіни:
- ручне керування робочою камерою, керування здійснюється за допомогою клавіатури;
- керування за допомогою машинного зору, пошук особи на зображенні та слідування за ним.
Стек:
- Gtk4 та компоненти Adwaita, Gio, GDK, GObject, GLib;
- Python3;
- OpenCV, PySerial, logging, Cairo, numpy;
- CSS;
- Linux, PyCharm, Gnome Builder, Cambalache, Glade.
#Gtk #Python3 #usb #OpenCV #NumPy #css #Pycharm #desktop #linux