Пневматичний захват для підносів
Інжиніринг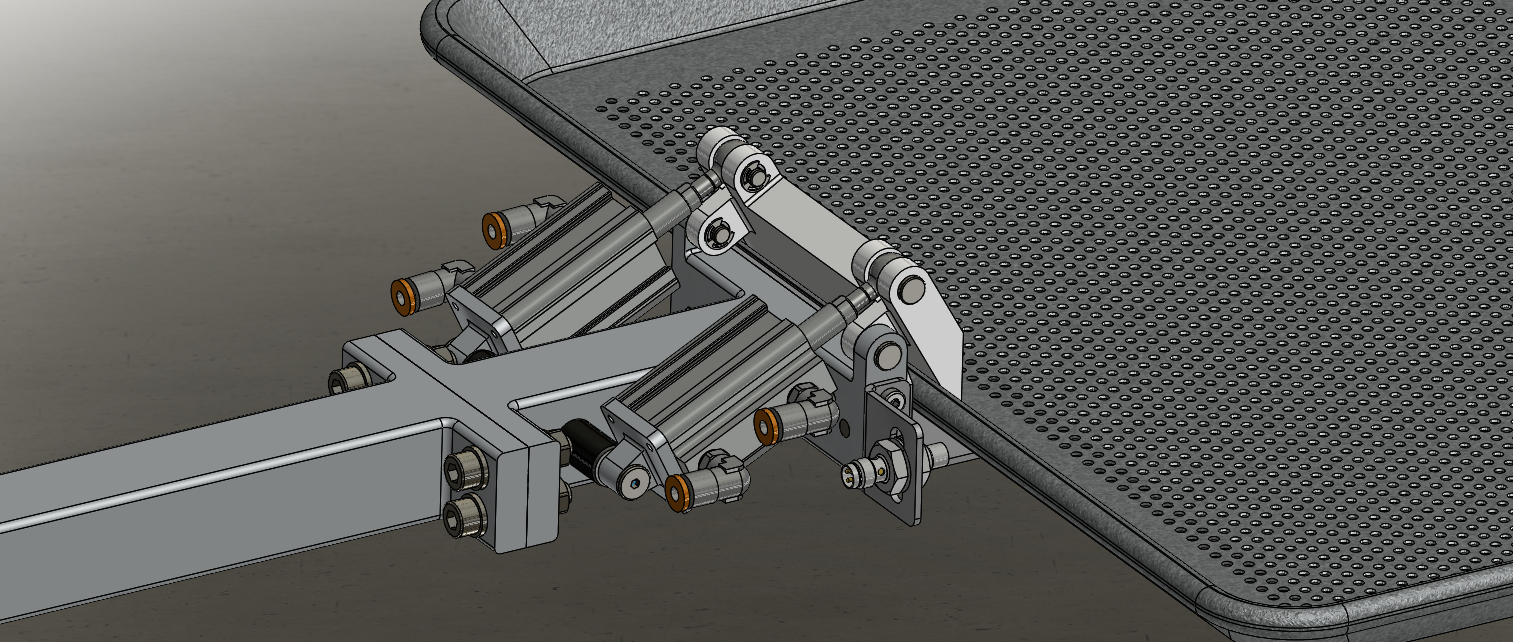
Захват для підносів, адаптований під роботизовану систему
Розроблено спеціальний захватний пристрій для автоматизованого захоплення та переміщення підносів з навантаженням. Система адаптована для встановлення на роботизований маніпулятор, забезпечує надійний і стабільний захват під час роботи.
Основні особливості:
- Пневматичний механізм захвату – забезпечує сильне і контрольоване стискання для утримання підносів навіть з важким вантажем.
- Спеціальна геометрія захвата – пристосована під форму та габарити підносів для максимальної стабільності.
- Адаптація до роботи з промисловим роботом – конструкція передбачає легке кріплення до стандартних фланців роботів.
- Оптимізована вага конструкції – дозволяє зберігати динаміку і точність руху робота.
- Можливість роботи в циклічному режимі – розрахована на інтенсивне використання в автоматизованих процесах.
Проєкт виконаний у SolidWorks, з урахуванням вагових характеристик і розподілу навантаження.
Розроблено спеціальний захватний пристрій для автоматизованого захоплення та переміщення підносів з навантаженням. Система адаптована для встановлення на роботизований маніпулятор, забезпечує надійний і стабільний захват під час роботи.
Основні особливості:
- Пневматичний механізм захвату – забезпечує сильне і контрольоване стискання для утримання підносів навіть з важким вантажем.
- Спеціальна геометрія захвата – пристосована під форму та габарити підносів для максимальної стабільності.
- Адаптація до роботи з промисловим роботом – конструкція передбачає легке кріплення до стандартних фланців роботів.
- Оптимізована вага конструкції – дозволяє зберігати динаміку і точність руху робота.
- Можливість роботи в циклічному режимі – розрахована на інтенсивне використання в автоматизованих процесах.
Проєкт виконаний у SolidWorks, з урахуванням вагових характеристик і розподілу навантаження.