BPL „Bikopter” na bazie Arduino
C i C++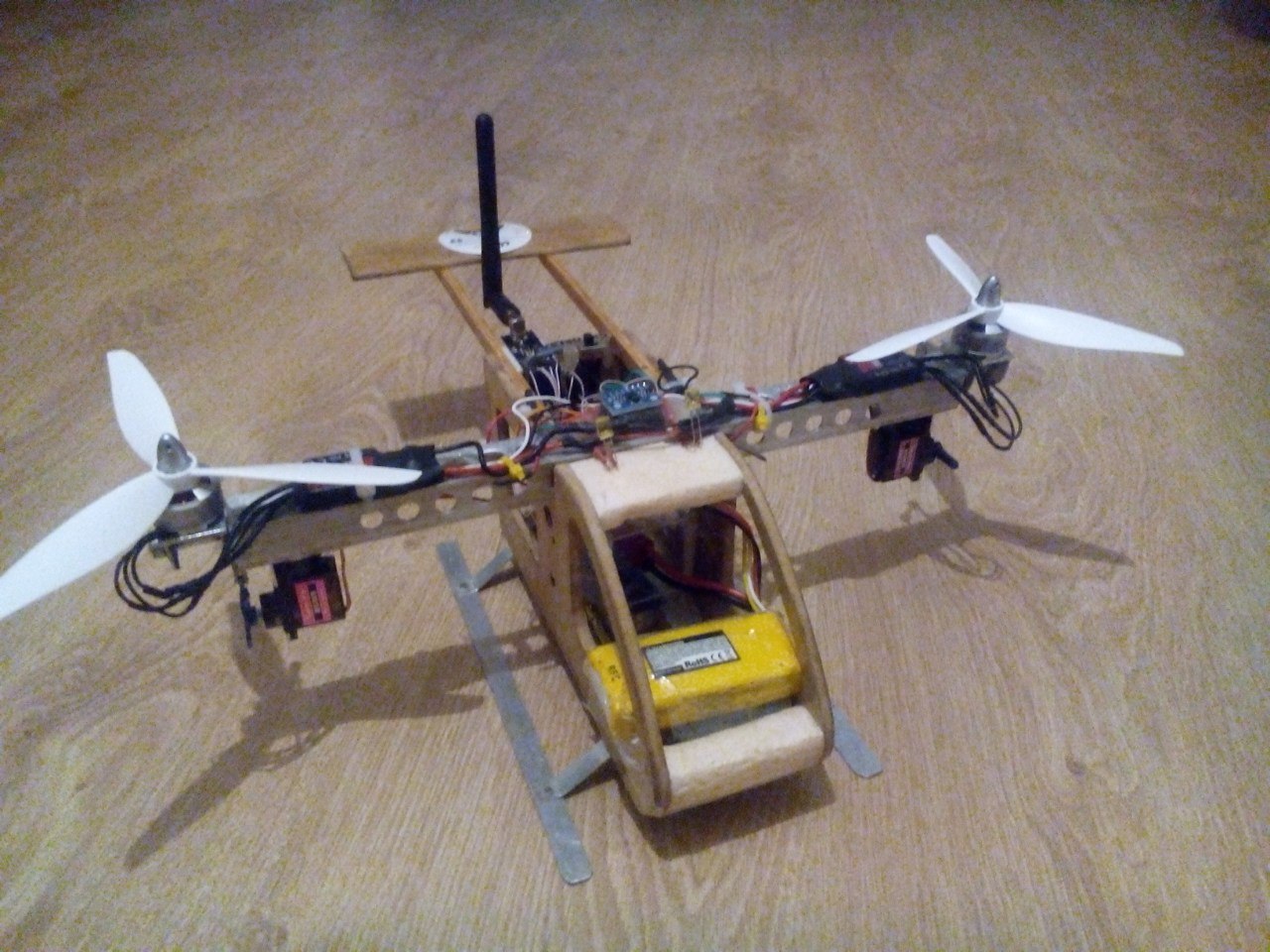
Opracowanie i projektowanie systemu sterowania dla bezzałogowego samolotu z dalszym wprowadzeniem do systemu mikrokontrolera opartego na mikrokontrolerach rodziny Arduino. Urządzenie jest wyposażone w czujnik hiroskopowy do określania kątów pozycji AA w przestrzeni, a także czujnik ultradźwiękowy wysokości. Zapewnia stabilizację urządzenia w przestrzeni, a także bezprzewodową transmisję danych z IC na IC operatora komunikacji, aby wyświetlić cechy lotu i przekazywać dowody sterowania.