Aplikacja do sterowania dronem
Kompleksowe oprogramowanie do zarządzania dronami
Wysokooptymalizowany system zarządzania dronami, opracowany w C++ z wykorzystaniem protokołu MAVLink na bazie PX4-Autopilot. Projekt wyróżnia się wieloplatformowością (x86, ARM) oraz wysoką wydajnością, zapewniając stabilną pracę nawet na mikrokontrolerach poziomu Raspberry Pi 4.
Kluczowe możliwości i stos technologii:
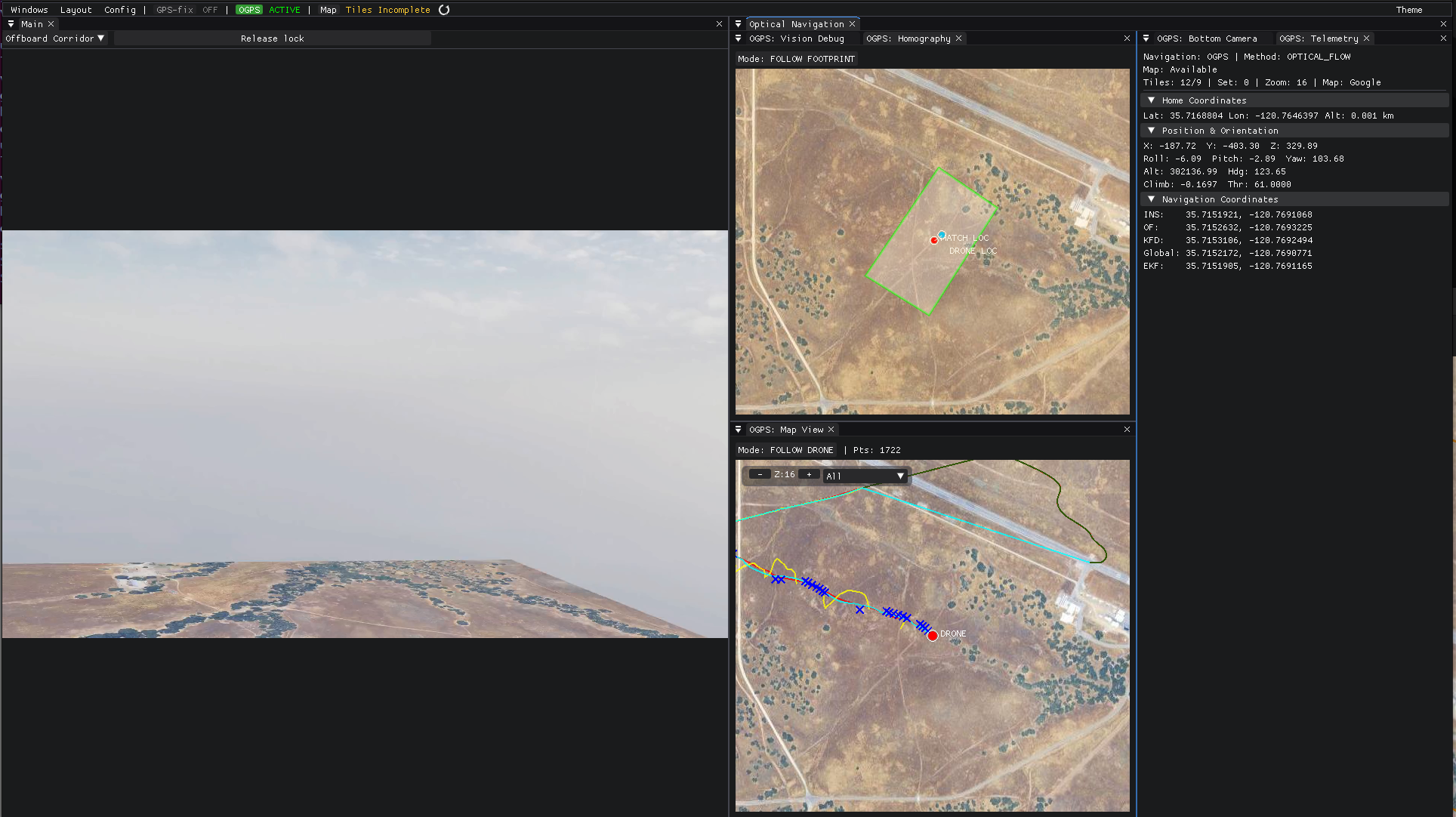
1) Zarządzanie lotem: Wsparcie dla trybów ręcznych i offboard, realizacja zautomatyzowanych zadań lotniczych (flight tasks), pełnoprawny autopilot. Opracowano wygodny panel Operatora.
2) Wzrok komputerowy (CV): Wielopoziomowy system nawigacji w warunkach braku GPS (GPS-denied). Zintegrowano YOLO do wykrywania i śledzenia obiektów, a także system ROI-lock do automatycznego przechwytywania i utrzymywania celów.
3) Multimedia i dane: Przetwarzanie strumienia wideo zrealizowane za pomocą GStreamer. Do lokalnego przechowywania danych używane jest SQLite. System wyposażony jest w dynamiczny downloader map (Dynamic Map Downloader).
4) Sieć i wymiana danych: Niezawodne połączenie za pomocą protokołu UDP. Zrealizowano superszybką binarną serializację i deserializację pakietów sieciowych. Do efektywnej generacji, walidacji i przetwarzania typów danych zastosowano metaprogramowanie C++, co zapewnia maksymalną optymalizację i bezpieczeństwo typów (type safety) już na etapie kompilacji.
5) Symulacja i testowanie: Projekt jest w pełni dostosowany do pracy z symulatorami Gazebo i FlightGear.
Wysokooptymalizowany system zarządzania dronami, opracowany w C++ z wykorzystaniem protokołu MAVLink na bazie PX4-Autopilot. Projekt wyróżnia się wieloplatformowością (x86, ARM) oraz wysoką wydajnością, zapewniając stabilną pracę nawet na mikrokontrolerach poziomu Raspberry Pi 4.
Kluczowe możliwości i stos technologii:
1) Zarządzanie lotem: Wsparcie dla trybów ręcznych i offboard, realizacja zautomatyzowanych zadań lotniczych (flight tasks), pełnoprawny autopilot. Opracowano wygodny panel Operatora.
2) Wzrok komputerowy (CV): Wielopoziomowy system nawigacji w warunkach braku GPS (GPS-denied). Zintegrowano YOLO do wykrywania i śledzenia obiektów, a także system ROI-lock do automatycznego przechwytywania i utrzymywania celów.
3) Multimedia i dane: Przetwarzanie strumienia wideo zrealizowane za pomocą GStreamer. Do lokalnego przechowywania danych używane jest SQLite. System wyposażony jest w dynamiczny downloader map (Dynamic Map Downloader).
4) Sieć i wymiana danych: Niezawodne połączenie za pomocą protokołu UDP. Zrealizowano superszybką binarną serializację i deserializację pakietów sieciowych. Do efektywnej generacji, walidacji i przetwarzania typów danych zastosowano metaprogramowanie C++, co zapewnia maksymalną optymalizację i bezpieczeństwo typów (type safety) już na etapie kompilacji.
5) Symulacja i testowanie: Projekt jest w pełni dostosowany do pracy z symulatorami Gazebo i FlightGear.
 Dubaj
Dubaj