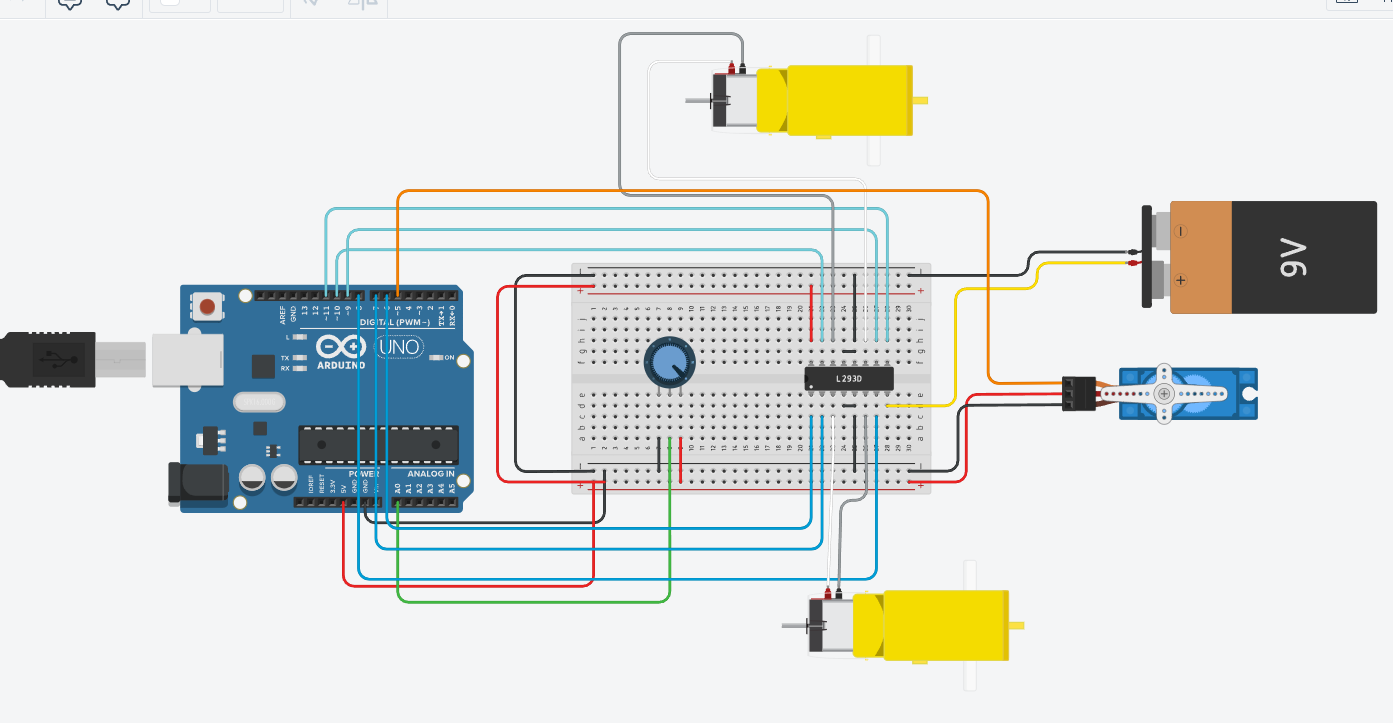
Цей проект являє собою систему управління двома моторами постійного струму та одним сервоприводом за допомогою мікроконтролера Arduino Uno. Він був реалізований у навчальних цілях для демонстрації навичок роботи з моторним драйвером L293D, потенціометром, сервоприводом і макетною платою.
Мета проекту:
Створити керовану платформу, в якій користувач може за допомогою потенціометра змінювати положення сервомотора або регулювати напрямок і швидкість обертання моторів постійного струму.
Використовувані компоненти:
Плата Arduino Uno
Моторний драйвер L293D
2 двигуни постійного струму
1 сервопривід
Потенціометр
Макетна плата
Джерела живлення (USB і 9V батарея)
Функціонал:
Управління напрямком обертання двох моторів через драйвер L293D.
Контроль положення сервомотора за допомогою потенціометра.
Використання аналогового сигналу від потенціометра для задання швидкості або кута.
Окреме живлення для моторів і контролера, що забезпечує стабільну роботу системи.
Навички, продемонстровані у проекті:
Проектування схем на макетній платі
Робота з зовнішнім живленням і захист контролера
Управління ШІМ-сигналами (PWM)
Використання потенціометра для аналогового вводу
Програмування Arduino для роботи з моторами і сенсорами
Застосування:
Подібна система може бути використана для створення:
Роботизованих тележок
Маніпуляторів
Інтерактивних моделей і тренажерів
Мета проекту:
Створити керовану платформу, в якій користувач може за допомогою потенціометра змінювати положення сервомотора або регулювати напрямок і швидкість обертання моторів постійного струму.
Використовувані компоненти:
Плата Arduino Uno
Моторний драйвер L293D
2 двигуни постійного струму
1 сервопривід
Потенціометр
Макетна плата
Джерела живлення (USB і 9V батарея)
Функціонал:
Управління напрямком обертання двох моторів через драйвер L293D.
Контроль положення сервомотора за допомогою потенціометра.
Використання аналогового сигналу від потенціометра для задання швидкості або кута.
Окреме живлення для моторів і контролера, що забезпечує стабільну роботу системи.
Навички, продемонстровані у проекті:
Проектування схем на макетній платі
Робота з зовнішнім живленням і захист контролера
Управління ШІМ-сигналами (PWM)
Використання потенціометра для аналогового вводу
Програмування Arduino для роботи з моторами і сенсорами
Застосування:
Подібна система може бути використана для створення:
Роботизованих тележок
Маніпуляторів
Інтерактивних моделей і тренажерів