The Android application has been created to control a robotic arm via WiFi.
The manipulator has an ESP32-CAM module that provides two HTTP MJPEG (camera) and Web Socket (for commands to the manipulator) servers.
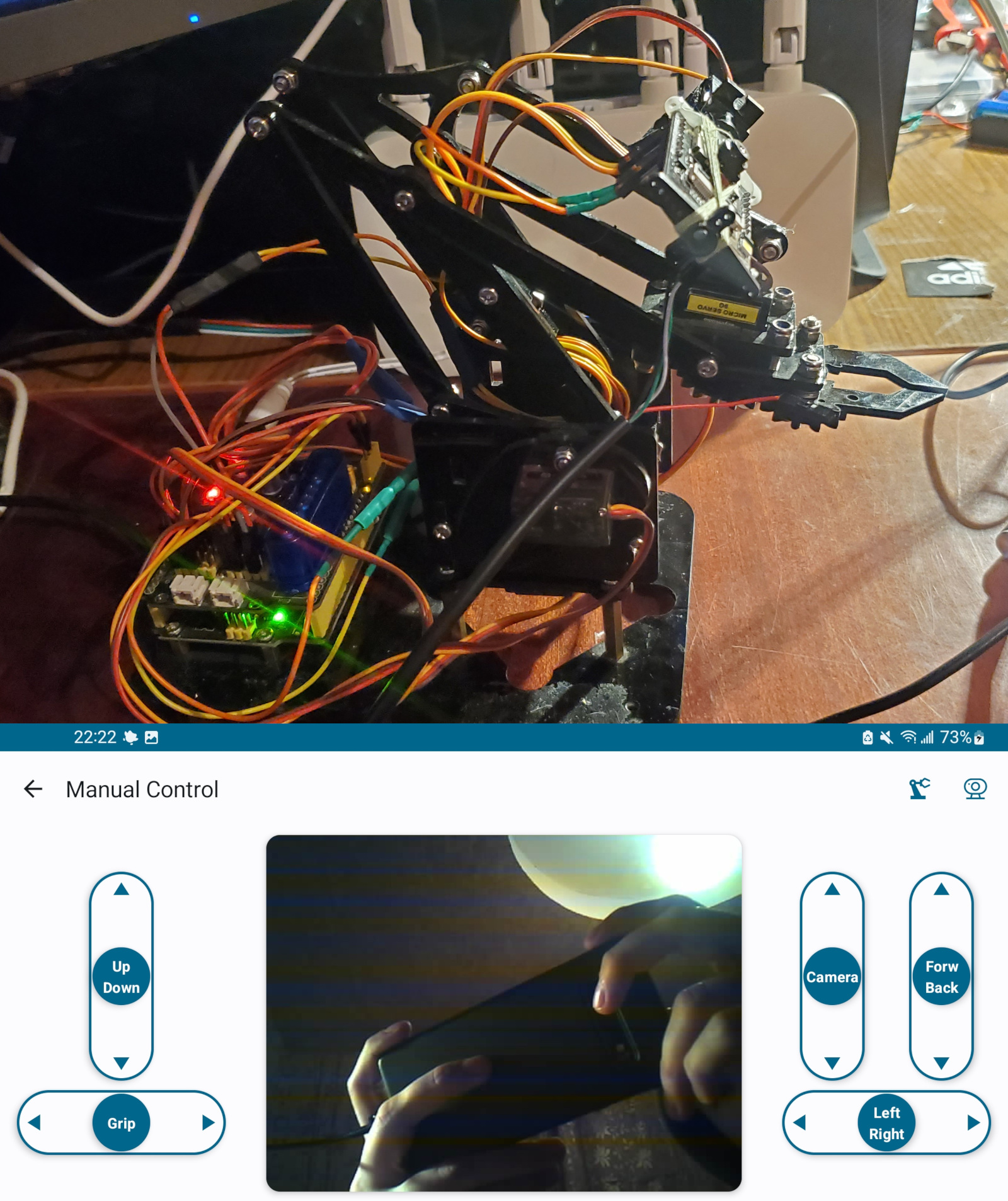
The application has the following functionality:
- Joysticks for controlling all axes of the manipulator using direct and inverse kinematics;
- Element for receiving images from the manipulator's camera;
- The functionality of connecting / disconnecting the camera and manipulator;
- Handling all errors related to the network when working with the camera and manipulator.
Stack:
- Kotlin JVM
- Android Jetpack Compose with Material3;
- Volley;
- okhttp3;
- HTTP MJPEG;
- Web Sockets;
#esp32 #Arduino #java #Kotlin #Android #wifi #websocket #HTTP #material-design
The manipulator has an ESP32-CAM module that provides two HTTP MJPEG (camera) and Web Socket (for commands to the manipulator) servers.
The application has the following functionality:
- Joysticks for controlling all axes of the manipulator using direct and inverse kinematics;
- Element for receiving images from the manipulator's camera;
- The functionality of connecting / disconnecting the camera and manipulator;
- Handling all errors related to the network when working with the camera and manipulator.
Stack:
- Kotlin JVM
- Android Jetpack Compose with Material3;
- Volley;
- okhttp3;
- HTTP MJPEG;
- Web Sockets;
#esp32 #Arduino #java #Kotlin #Android #wifi #websocket #HTTP #material-design