Inercial Tracking System on Arduino
C & C++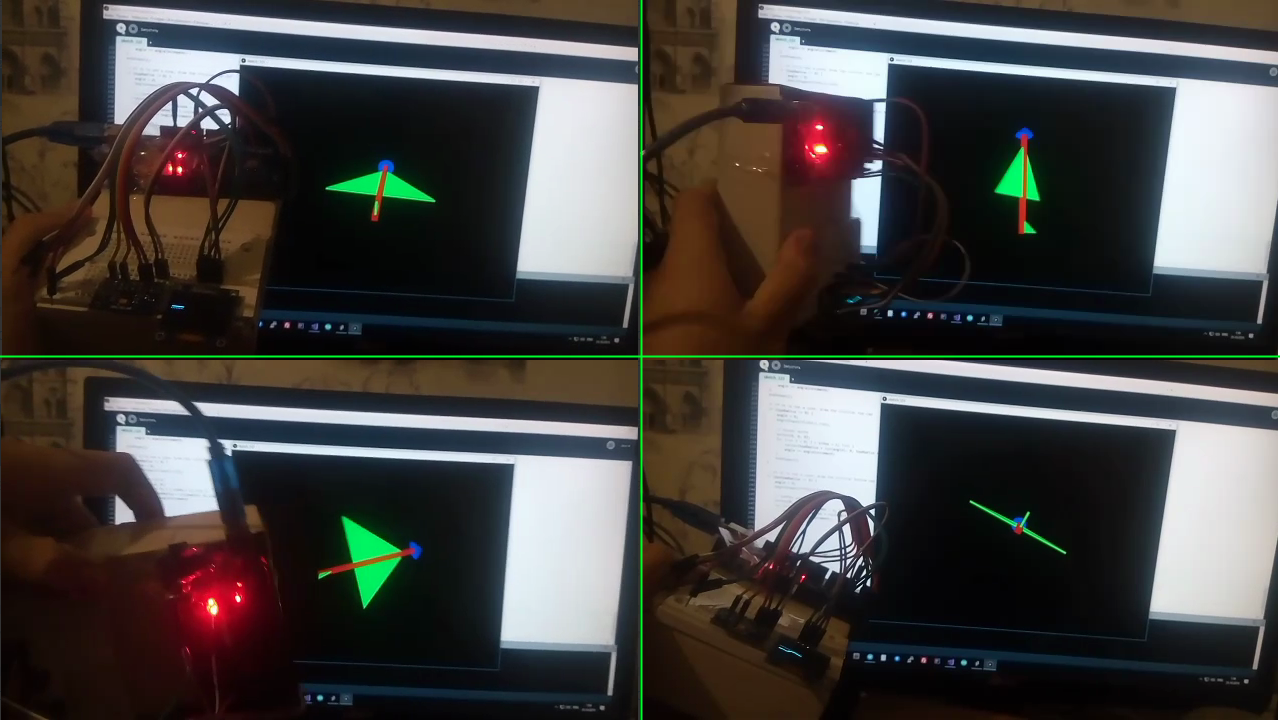
A small program for the #microcontroller performing the reading of data from the #factor(#accelerometer, #hyroscope), the processing of data and the transmission of ready coordinates and orientations to the PC. A special algorithm performs the filtration of the signal and the depression of the errors using different calibration data including the temperature of the sensor. The data is integrated and the output is quaternion which is transmitted to the PC, where there is a small program that allows to visualize the data. Update frequency approximately 1 to 2 kHz which provides smoothness and fast reaction to small changes in position and orientation of the device. It is possible to transfer data via WiFi or save it on a memory card. It can be used in various projects, as an add-on to optical tracking in VR.