Ten projekt przedstawia system sterowania dwoma silnikami DC i jednym serwomechanizmem za pomocą mikrokontrolera Arduino Uno. Został zrealizowany w celach edukacyjnych, aby zademonstrować umiejętności obsługi sterownika silników L293D, potencjometru, serwomechanizmu i płytki prototypowej.
Cel projektu:
Stworzyć platformę sterowaną, na której użytkownik może za pomocą potencjometru zmieniać pozycję serwomechanizmu lub regulować kierunek i prędkość obrotu silników DC.
Użyte komponenty:
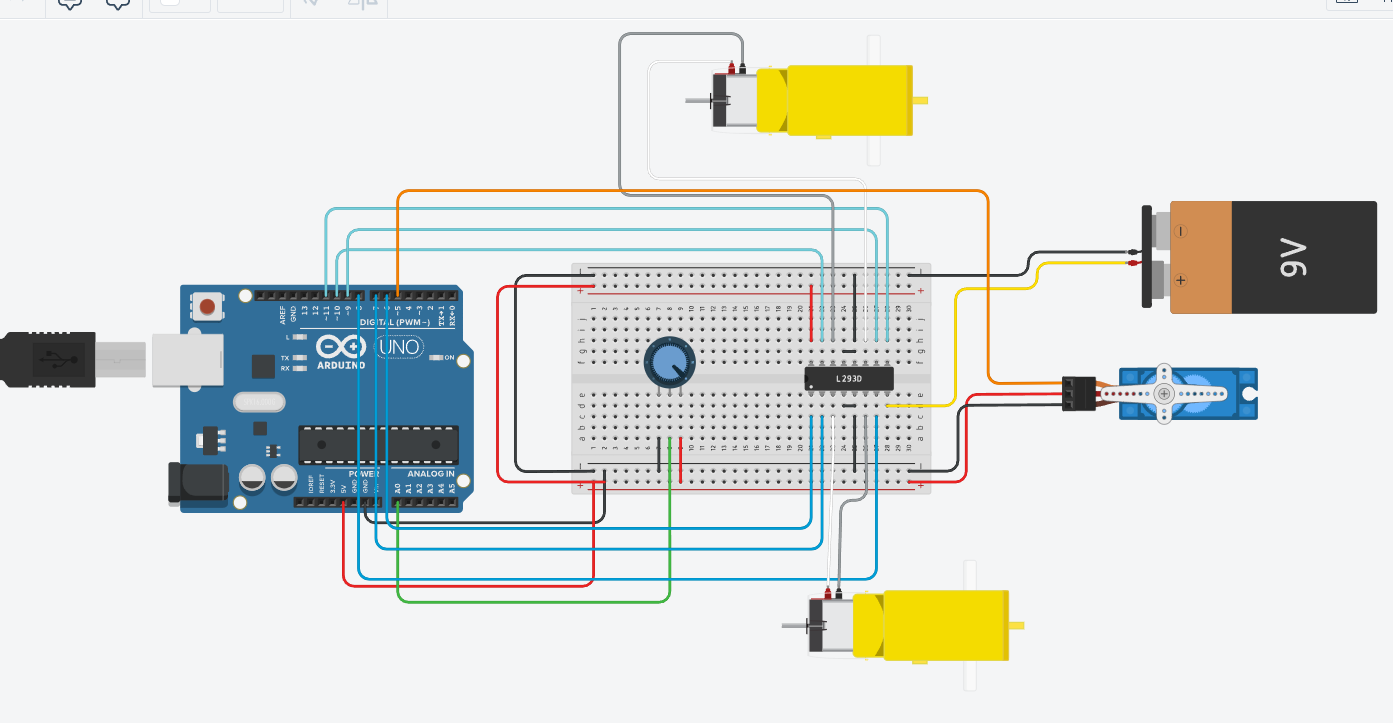
Płytka Arduino Uno
Sterownik silników L293D
2 silniki DC
1 serwomechanizm
Potencjometr
Płytka prototypowa
Źródła zasilania (USB i bateria 9V)
Funkcje:
Sterowanie kierunkiem obrotu dwóch silników za pomocą sterownika L293D.
Kontrola położenia serwomechanizmu za pomocą potencjometru.
Użycie sygnału analogowego z potencjometru do ustawiania prędkości lub kąta.
Oddzielne zasilanie dla silników i kontrolera, zapewniające stabilną pracę systemu.
Umiejętności zaprezentowane w projekcie:
Projektowanie schematów na płytce prototypowej
Praca z zewnętrznym zasilaniem i ochrona kontrolera
Sterowanie sygnałami PWM
Użycie potencjometru do wejścia analogowego
Programowanie Arduino do obsługi silników i czujników
Zastosowanie:
Podobny system może być używany do tworzenia:
Robotycznych wózków
Manipulatorów
Interaktywnych modeli i symulatorów
Cel projektu:
Stworzyć platformę sterowaną, na której użytkownik może za pomocą potencjometru zmieniać pozycję serwomechanizmu lub regulować kierunek i prędkość obrotu silników DC.
Użyte komponenty:
Płytka Arduino Uno
Sterownik silników L293D
2 silniki DC
1 serwomechanizm
Potencjometr
Płytka prototypowa
Źródła zasilania (USB i bateria 9V)
Funkcje:
Sterowanie kierunkiem obrotu dwóch silników za pomocą sterownika L293D.
Kontrola położenia serwomechanizmu za pomocą potencjometru.
Użycie sygnału analogowego z potencjometru do ustawiania prędkości lub kąta.
Oddzielne zasilanie dla silników i kontrolera, zapewniające stabilną pracę systemu.
Umiejętności zaprezentowane w projekcie:
Projektowanie schematów na płytce prototypowej
Praca z zewnętrznym zasilaniem i ochrona kontrolera
Sterowanie sygnałami PWM
Użycie potencjometru do wejścia analogowego
Programowanie Arduino do obsługi silników i czujników
Zastosowanie:
Podobny system może być używany do tworzenia:
Robotycznych wózków
Manipulatorów
Interaktywnych modeli i symulatorów