This project is a high-precision indoor positioning system based on Ultra Wideband (UWB) technology. It uses several UWB anchors placed at fixed positions and a mobile UWB tag mounted on a moving object (for example, a robot or a cart). The system continuously measures the Time of Flight (ToF) between the tag and the anchors, and also applies multilateration to calculate the two-dimensional coordinates of the tag in real time.
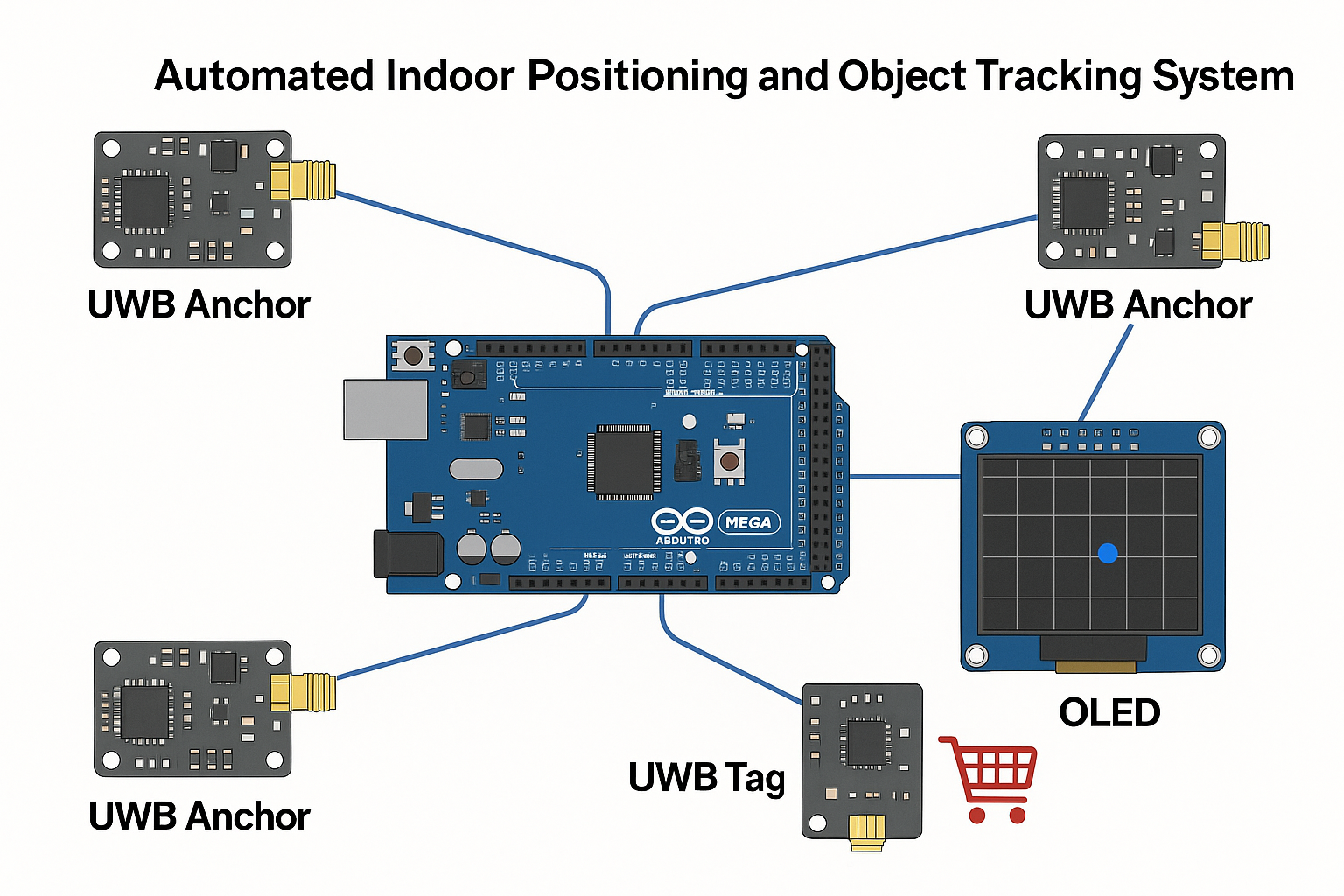
The Arduino Mega acts as the central controller, which communicates with the UWB modules and calculates the position. The current location is visualized on an OLED display in real time.
The Arduino Mega acts as the central controller, which communicates with the UWB modules and calculates the position. The current location is visualized on an OLED display in real time.