BPL “Bicopter” at Arduino Base
C & C++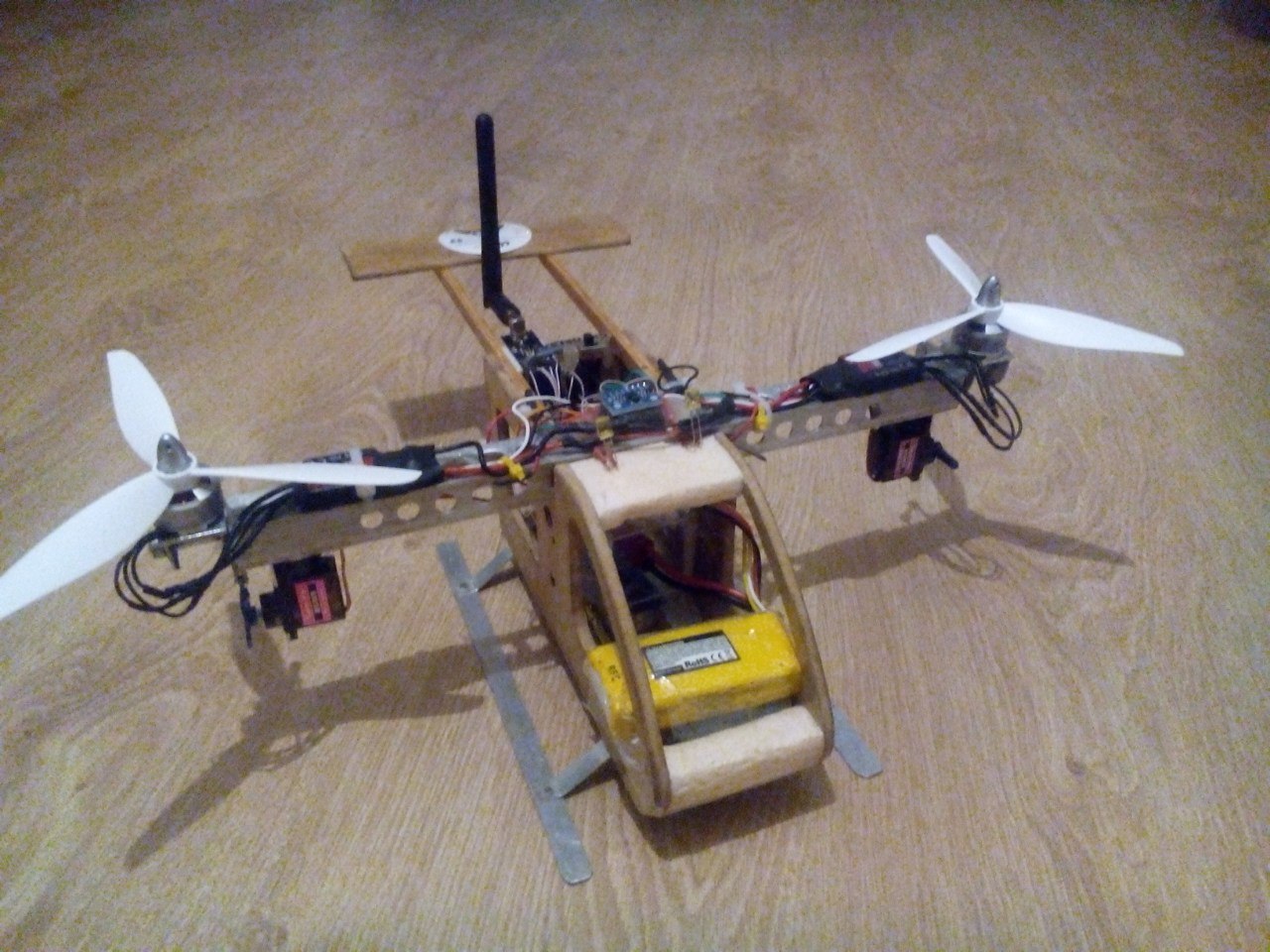
Development and design of a control system for a drone with further introduction to the Arduino family microcontroller system. This device is equipped with a hieroscopic sensor to determine the angles of the LA position in space, as well as the ultrasound height sensor. It ensures the stabilization of the device in space, as well as the wireless transmission of data from the boarding IC to the communication operator's IC to display flight characteristics and transmission of control commands.