Drone Control Application
Комплексне програмне забезпечення для управління БПЛА
Високооптимізована система керування дронами, розроблена на C++ з використанням протоколу MAVLink на базі PX4-Autopilot. Проєкт вирізняється кросплатформністю (x86, ARM) та високою продуктивністю, забезпечуючи стабільну роботу навіть на мікрокомп'ютерах рівня Raspberry Pi 4.
Ключові можливості та стек технологій:
1)Управління польотом: Підтримка ручного та offboard режимів, виконання автоматизованих польотних завдань (flight tasks), повноцінний автопілот. Розроблено зручну панель Оператора.
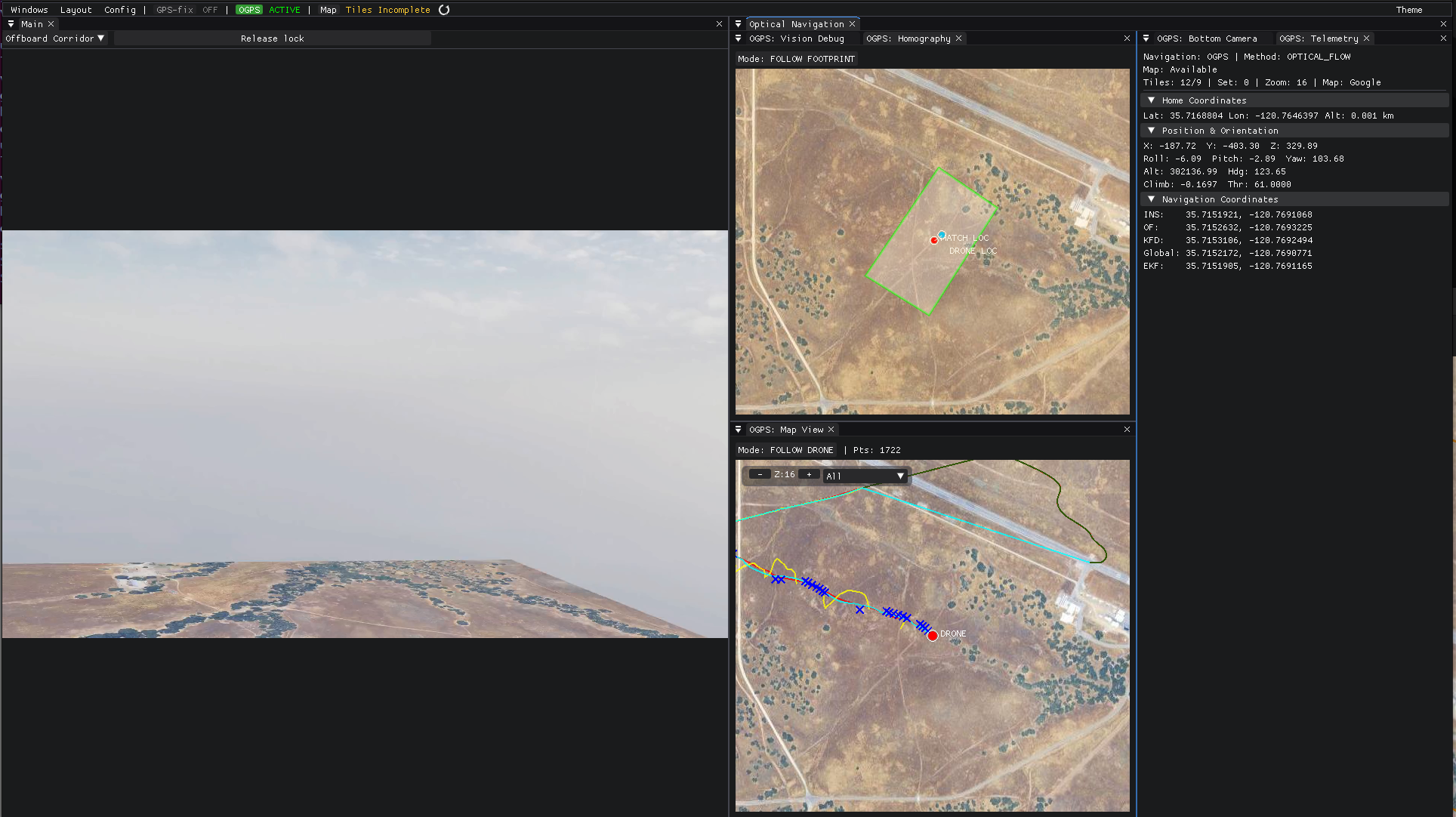
2)Комп'ютерний зір (CV): Багаторівнева система навігації для умов відсутності GPS (GPS-denied). Інтегровано YOLO для виявлення та відстеження об'єктів, а також систему ROI-lock для автоматичного захоплення та утримання цілей.
3)Мультимедіа та Дані: Обробка відеопотоку реалізована за допомогою GStreamer. Для локального збереження даних використовується SQLite. Система оснащена динамічним завантажувачем мап (Dynamic Map Downloader).
4)Мережа та обмін даними: Надійне підключення по протоколу UDP. Реалізовано надшвидку бінарну серіалізацію та десеріалізацію мережевих пакетів. Для ефективної генерації, валідації та обробки типів даних застосовано C++ метапрограмування, що забезпечує максимальну оптимізацію та безпеку типів (type safety) ще на етапі компіляції.
5)Симуляція та тестування: Проєкт повністю налаштований для роботи з симуляторами Gazebo та FlightGear.
Високооптимізована система керування дронами, розроблена на C++ з використанням протоколу MAVLink на базі PX4-Autopilot. Проєкт вирізняється кросплатформністю (x86, ARM) та високою продуктивністю, забезпечуючи стабільну роботу навіть на мікрокомп'ютерах рівня Raspberry Pi 4.
Ключові можливості та стек технологій:
1)Управління польотом: Підтримка ручного та offboard режимів, виконання автоматизованих польотних завдань (flight tasks), повноцінний автопілот. Розроблено зручну панель Оператора.
2)Комп'ютерний зір (CV): Багаторівнева система навігації для умов відсутності GPS (GPS-denied). Інтегровано YOLO для виявлення та відстеження об'єктів, а також систему ROI-lock для автоматичного захоплення та утримання цілей.
3)Мультимедіа та Дані: Обробка відеопотоку реалізована за допомогою GStreamer. Для локального збереження даних використовується SQLite. Система оснащена динамічним завантажувачем мап (Dynamic Map Downloader).
4)Мережа та обмін даними: Надійне підключення по протоколу UDP. Реалізовано надшвидку бінарну серіалізацію та десеріалізацію мережевих пакетів. Для ефективної генерації, валідації та обробки типів даних застосовано C++ метапрограмування, що забезпечує максимальну оптимізацію та безпеку типів (type safety) ще на етапі компіляції.
5)Симуляція та тестування: Проєкт повністю налаштований для роботи з симуляторами Gazebo та FlightGear.
 Дубаї
Дубаї