Drone Control Application
Comprehensive software for UAV management
A highly optimized drone control system developed in C++ using the MAVLink protocol based on PX4-Autopilot. The project stands out for its cross-platform compatibility (x86, ARM) and high performance, ensuring stable operation even on microcomputers like the Raspberry Pi 4.
Key features and technology stack:
1) Flight control: Support for manual and offboard modes, execution of automated flight tasks, full autopilot functionality. A user-friendly Operator panel has been developed.
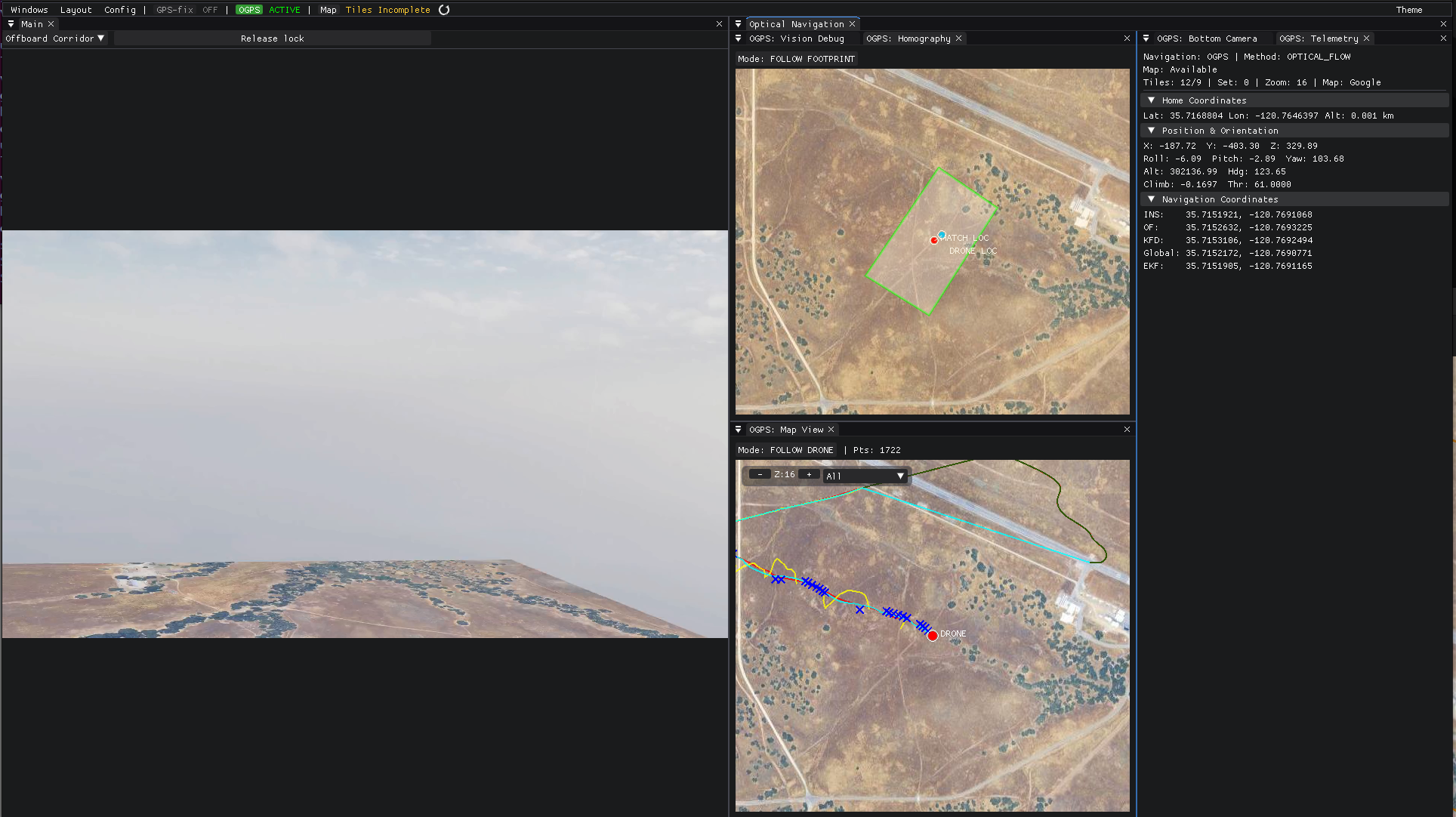
2) Computer vision (CV): A multi-level navigation system for GPS-denied conditions. YOLO is integrated for object detection and tracking, as well as an ROI-lock system for automatic target acquisition and retention.
3) Multimedia and Data: Video stream processing is implemented using GStreamer. SQLite is used for local data storage. The system is equipped with a Dynamic Map Downloader.
4) Networking and data exchange: Reliable connection via UDP protocol. Ultra-fast binary serialization and deserialization of network packets have been implemented. C++ metaprogramming is applied for efficient generation, validation, and processing of data types, ensuring maximum optimization and type safety at compile time.
5) Simulation and testing: The project is fully configured to work with Gazebo and FlightGear simulators.
A highly optimized drone control system developed in C++ using the MAVLink protocol based on PX4-Autopilot. The project stands out for its cross-platform compatibility (x86, ARM) and high performance, ensuring stable operation even on microcomputers like the Raspberry Pi 4.
Key features and technology stack:
1) Flight control: Support for manual and offboard modes, execution of automated flight tasks, full autopilot functionality. A user-friendly Operator panel has been developed.
2) Computer vision (CV): A multi-level navigation system for GPS-denied conditions. YOLO is integrated for object detection and tracking, as well as an ROI-lock system for automatic target acquisition and retention.
3) Multimedia and Data: Video stream processing is implemented using GStreamer. SQLite is used for local data storage. The system is equipped with a Dynamic Map Downloader.
4) Networking and data exchange: Reliable connection via UDP protocol. Ultra-fast binary serialization and deserialization of network packets have been implemented. C++ metaprogramming is applied for efficient generation, validation, and processing of data types, ensuring maximum optimization and type safety at compile time.
5) Simulation and testing: The project is fully configured to work with Gazebo and FlightGear simulators.
 Dubai
Dubai