Pneumatic gripper for trays
Engineering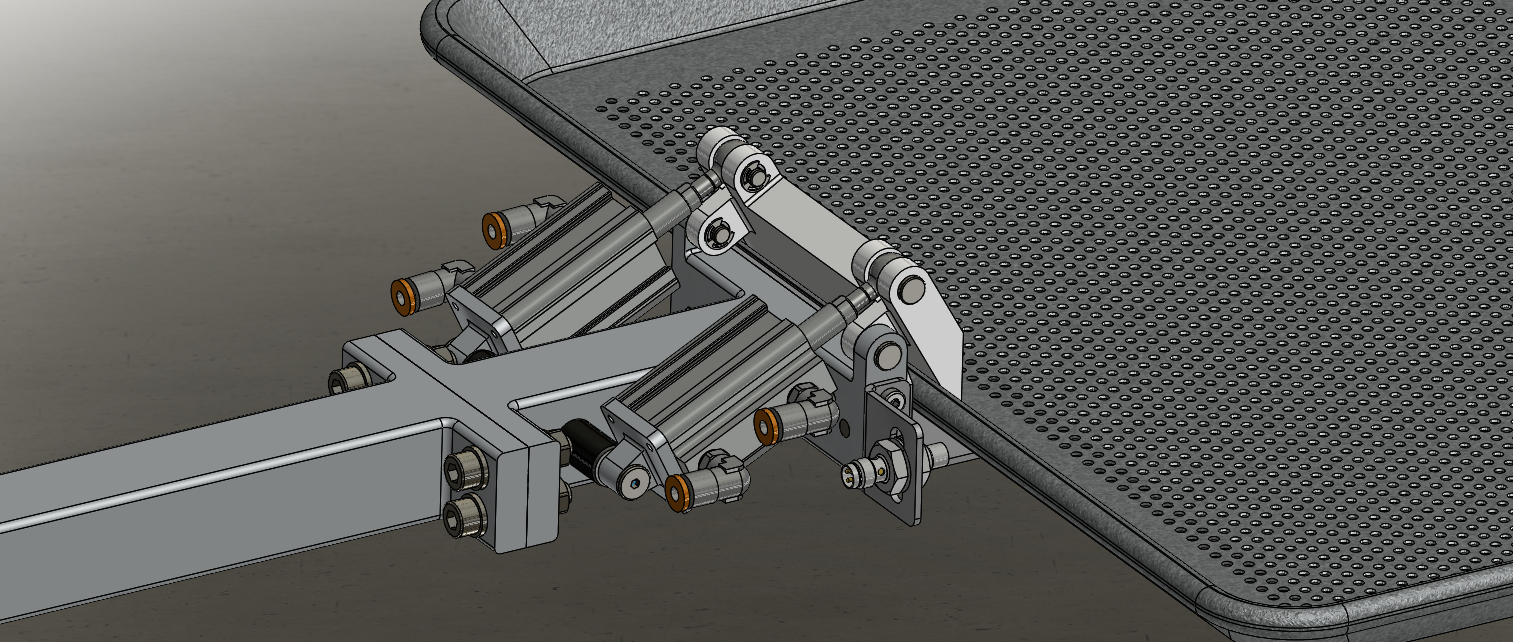
Tray gripper adapted for robotic system
A special gripping device has been developed for the automated capture and movement of trays with loads. The system is adapted for installation on a robotic manipulator, providing reliable and stable gripping during operation.
Key features:
- Pneumatic gripping mechanism – ensures strong and controlled compression to hold trays even with heavy loads.
- Special gripping geometry – tailored to the shape and dimensions of trays for maximum stability.
- Adaptation for use with industrial robots – the design allows for easy attachment to standard robot flanges.
- Optimized weight of the structure – allows for maintaining the dynamics and accuracy of the robot's movement.
- Capability to operate in a cyclical mode – designed for intensive use in automated processes.
The project was completed in SolidWorks, taking into account weight characteristics and load distribution.
A special gripping device has been developed for the automated capture and movement of trays with loads. The system is adapted for installation on a robotic manipulator, providing reliable and stable gripping during operation.
Key features:
- Pneumatic gripping mechanism – ensures strong and controlled compression to hold trays even with heavy loads.
- Special gripping geometry – tailored to the shape and dimensions of trays for maximum stability.
- Adaptation for use with industrial robots – the design allows for easy attachment to standard robot flanges.
- Optimized weight of the structure – allows for maintaining the dynamics and accuracy of the robot's movement.
- Capability to operate in a cyclical mode – designed for intensive use in automated processes.
The project was completed in SolidWorks, taking into account weight characteristics and load distribution.